歩行アシストデバイス
電気通信大学 下条研究室との共同研究
【研究内容】
加齢等にともなう筋力の低下により困難となった歩行や立ち上がり動作を補助するシステムを開発しています.表面筋電等を用いて関節トルクや関節剛性を推定することにより,生体側とアシスト機器側とを協調させ,随意的な動作が可能となるシステムの開発を目指しています.
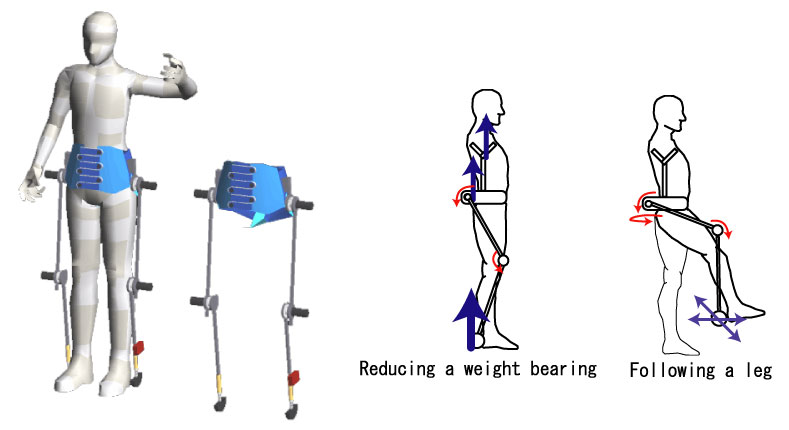
歩行アシストシステム
【主な担当者】 星野
【関連発表・論文など】
- 星野隆行, 友納昌則, 鈴木隆文, 下条誠, 満渕邦彦: 生体情報を反映した体重支持型歩行アシストシステム- 筋電信号からの歩行状態の推定 -, 第20回生体・生理工学シンポジウム論文集, 173-174 (2005)
- T. Hoshino, M. Tomono, R. Furusawa, T. Suzuki, M. Shimojo, K. Mabuchi: Development of a Motion Support System by Using an Electromyogram -Signal Processing of an Electromyogram to Estimate the Biomechanical Characteristics of Joints-, Proc of IEEE SMC 2004, 4432-4437 (2004)
- 星野隆行, 友納昌則, 鈴木隆文, 下条誠, 満渕邦彦: 生体信号を用いた運動機能アシストシステムの開発 -関節パラメータを推定するための表面筋電信号処理-, ROBOMEC04, 2A1-H-51(1-3) (2004)
- 友納昌則, 星野隆行, 鈴木隆文, 満渕邦彦, 下条誠: 自重支持機能を備えた歩行アシストシステムに関する基本検討, ROBOMEC04, 1P1-H-55(1-2) (2004)
- 星野隆行, 鈴木隆文, 満渕邦彦, 友納昌則, 下条誠: 生体信号を用いたアシストシステムの開発, 第18回生体・生理工学シンポジウム論文集, 131-132 (2003)
遠隔手術システム/触圧覚フィードバック
兵庫県立大学工学部石垣研究室・芝浦工業大学大倉研究室との共同研究
遠隔手術や、微細手術、低侵襲手術におけるマスター・スレーブ方式の手術ロボットにおいては、視覚情報だけでなく、医者(術者)への「手の感覚」のフィードバックが非常に重要です。当研究室では、鉗子を使用した力覚フィードバックシステムを開発すると共に、触力覚情報を聴覚情報に変換して呈示するシステムの開発も行っています。

力覚フィードバックを有する遠隔手術システム
【関連発表・論文など】
- T. Hoshino, H. Ishigaki, Y. Konishi, K. Kondo, T. Suzuki, T. Saito, N. Kakuta, A. Wagatsuma, K. Mabuchi: A master-slave manipulation system with a force-feedback function for endoscopic surgery, Proc. of 23rd International Conference of the IEEE EMBS, CD-ROM (2001)
- A. Matsui, K. Mabuchi, T. Suzuki, A. Namiki, M. Ishikawa, H. Fujioka, H. Ishigaki: Development of a remotely-operated master-slave manipulation system with a force-feedback function for use in endscopic surgery, Proc. of 22nd International Conference of the IEEE EMBS(Chicago2000), CD-ROM (2000)