感覚神経刺激による人工触圧覚生成
触覚伝達経路の途中の個々の感覚神経に,電気的に触覚情報を入力することにより,人工的な触覚を作り出すことを目的としています.(国立国際医療センター 神経内科 國本先生,電気通信大学 下条研究室,東京大学 石川研究室との共同研究)
【研究内容】
はじめに
本研究は,感覚神経線維への直接の情報入力によって人工的な触覚を生成し,触覚機能を有する義手を実現することを目的としています.これまでに,マイクロニューログラム法及び微小刺激法を用いて,覚醒状態のボランティアを被験者として研究を行ってきました.マイクロニューログラム法とは,針型の神経電極を,先端部が神経束内に到達するように経皮的に刺入して神経信号の計測を行うものです.先端部の微小な領域を除いて絶縁コーティングが施されているため,位置を調整することにより単一の神経線維の信号の計測が可能となります.この方法を神経刺激に応用したものが微小刺激法です.私達は通常対象としている正中神経の支配領域は,第一指から第四指と手掌部の主に手の平側の領域です.これまでに,
- 皮膚の感覚受容器に刺激を加えた際に生じる神経信号の解析と,逆に,人工感覚を生じさせるために必要な(神経線維に入力すべき)電気刺激パルス列の解析,
- 触覚呈示義肢システムの試作
- 多チャンネル化(複数ユニットの刺激)に関する検討
- 触覚フィードバック機能を備えた遠隔ロボットハンド操作システムの試作
を行ってきました.
単一ユニットにおけるコーディング規則解明
まず,皮膚の機械的感覚受容器から中枢神経系に信号を伝達している求心性の単一感覚神経線維(遅順応I型)にパルス状の電気刺激を加えることによって触覚を生じさせ,刺激の強度,周波数,パターンなどと,生じる感覚の種類,強度,領域などとの関連を解析しました.刺激電圧値を,単一ユニットのみを刺激しうる値に固定した上で,パルス間隔(パルス周波数)と生成される人工的な触覚(圧覚)の強度との関係を詳細に求めました.この結果,刺激パルス周波数と,生成される触覚(この場合は圧覚)との間の関係を求めることができました.
触覚呈示義肢システムの試作
この成果を利用して,触覚呈示義肢システムの試作を行いました.このシステムでは義手(木製の模型で代用)表面に触覚センサを装着し,触覚センサからの触覚情報を,上記の研究で求めた刺激パルス-生成感覚強度の関係を利用してリアルタイムで適切な刺激信号に変換して,被験者の感覚神経に入力しました.その結果,義手表面に加えられた機械的刺激の変化を,被験者に,自分の手の対応する部位での生成圧覚の変化として呈示することに成功しました.
多チャンネル化に関する検討
触圧覚呈示システムにおいてより自然な触圧覚を実現するためには,独立して刺激する神経線維(機械受容ユニット)の本数と種類を増やし,刺激ユニットの適切な組み合わせ(時空間的なパターン)を求めることが必要であると考えられます.実際,遅順応Ⅰ型ユニットの単一の刺激によって生成される感覚は,点ではなく直径数mmの円盤状で,かつ刺激の開始と終了の判別が難しい圧感覚が生じています.そこで,2個の機械受容ユニットへの同時刺激によって生成される感覚の時間的特性,空間的特性について検討を行っています.
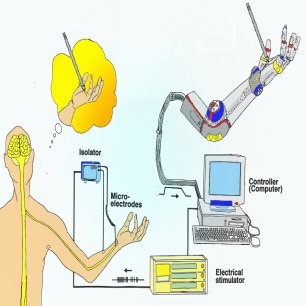
触覚フィードバック機能を備えたロボットハンド遠隔操作システム
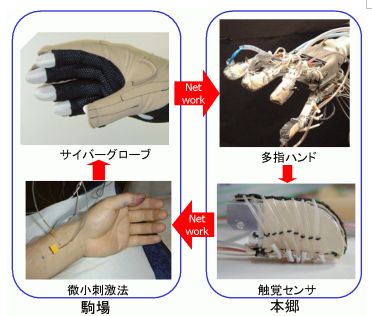
これまでの研究成果をふまえ,触覚フィードバック機能を備えたロボットハンド遠隔操作システムの開発を行いました.システムは,操作者の把持動作を計測するサイバーグローブ,サイバーグローブの指令により把持動作を行う多指ハンドシステム,多指ハンドの表面に装着した触覚センサ(感圧ゴム型),そして触感覚神経を直接刺激する微小電極を用いた感覚提示システム,およびこれらをネットワークで接続する各種制御用計算機システムから構成されています.
操作者(駒場リサーチキャンパス)の右手に装着したサイバーグローブからの情報によって,遠隔地(本郷キャンパス)のロボットハンドが操作され,ロボットハンドの指表面に装着した触覚センサからの情報は,リアルタイムで上記実験で得られたパルス周波数-呈示感覚強度の関係に従って適切な刺激パルスに変換されて,装着者の正中神経内に刺入したタングステン微小針電極によって,単一の感覚神経線維を刺激し,装着者に触覚が呈示されました.評価実験の結果,本システムでは,遠隔地のロボットハンドの指表面への機械的刺激が,ある程度の時間遅れを伴いつつも被験者に触覚として呈示可能であることが示されました.また,物体の把持などの運動にも成功しました.
【主な担当者】 鈴木,満渕
【関連発表・論文など】
- 鈴木隆文, 國本雅也, 満渕邦彦: 感覚神経刺激による人工触圧覚生成, BME, 18 (4), 29-35 (2004)
- Makoto Shimojo, Takafumi Suzuki, Akio Namiki, Takashi Saito, Masanari Kunimoto, Ryota Makino, Hironori Ogawa, Masatoshi Ishikawa, Kunihiko Mabuchi: Development of a system for experiencing tactile sensation from robot hand by electrically stimulating sensory nerve fiber, Proc. of IEEE International Conference on Robotics and Automation, 1264-1270 (2003)
- Makoto Shimojo, Ryota Makino, Hironori Ogawa, Takafumi Suzuki, Akio Namiki, Takashi Saito, Masanari Kunimoto, Masatoshi Ishikawa, Kunihiko Mabuchi: Development of a system for experiencing tactile sensation from a robot hand by electrically stimulating sensory nerve fiber, Proc. of 6th Japan-France Congress on Mechatronics & 4th Asia-Europe Congress on Mechatronics, 471-476 (2003)
- 鈴木隆文, 國本雅也, 齋藤敬, 満渕邦彦: 感覚神経電気刺激による触圧覚呈示法の研究 ~2個の機械受容ユニットの同時刺激に関する検討~, Proc of SICE2001(CD-ROM), (2001)
- T. Suzuki, K. Mabuchi, M. Kunimoto, M. Shimojo, T. Saito, N. Kakuta, M. Ohkura, M. Ishikawa: Relationship between intraneural electrical stimulation and evoked pressure sensation -Psychophysical quantification-, Proc of IFESS2000, 407-409 (2000)
- T. Suzuki, M. Kunimoto, M. Shimojo, T. Saito, M. Ishikawa, K. Mabuchi: Sensation evoked by simultaneous electrical stimulation of two single mechanoreceptor units, Proc. of 22nd International Conference of the IEEE EMBS(Chicago2000) (CD-ROM), (2000)
- T. Suzuki, K. Mabuchi, H. Nishimura, T. Saito, N. Kakuta, M. Kunimoto, M. Shimojo, M. Ishikawa: The Electrical Control of Pressure Sensations: The Relationship Between Stimulation Signals and Subjective Intensities and Areas, Proc. of 21st International Conference of the IEEE EMBS (CD-ROM), 457 (1999)