運動神経信号による義手制御
(国立国際医療センター神経内科國本先生,東京大学 石川研究室との共同研究)
【研究内容】
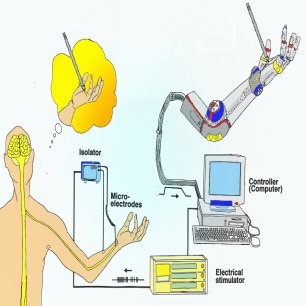
運動神経の情報を利用することによって,自在に動かすことのできる義手の開発を目的としています.運動神経信号の安定計測の手法を検討すると共に,運動神経信号とほぼ等価な情報を有する,針筋電の情報を利用したロボットハンド制御について研究を進めています.
【研究内容の詳細】(作成中)
【主な担当者】 鈴木,満渕
【関連発表・論文など】
- 古川 浩太郎, 筋活動電位による義手制御に関する基礎的研究, 卒業論文 (2005.3)