次世代義手の開発
生体の神経系と義手の情報ラインを直接接続することによって,あたかも自分の手であるかのように触覚を感じ,また,自在に動かすことのできるような次世代の義手の開発を目指して研究を進めています. (国立国際医療センター神経内科國本先生との共同研究)
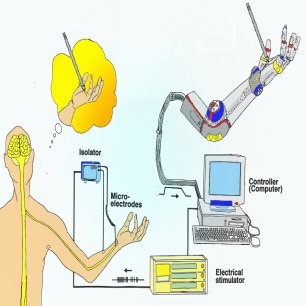
感覚神経刺激による人工触圧覚生成
触覚伝達経路の途中の個々の感覚神経に,電気的に触覚情報を入力することにより,人工的な触覚を作り出すことを目的としています.
運動神経信号による義手制御
運動神経の情報を利用することによって,自在に動かすことのできる義手の開発を目的としています.運動神経信号の安定計測の手法を検討すると共に,運動神経信号とほぼ等価な情報を有する,針筋電の情報を利用したロボットハンド制御について研究を進めています.